

Your reliable partner
We provide you with reliable and future-proof automatic packaging systems – and give you holistic advice right from the very start. Find out together with us how you can generate extra profit for your value creation process in the long term.

Carton Erectors

Case Packer

Carton Sealers

Robotic Palletizer

Shrink Wrapper

E-commerce Packing Machines

Tray Formers

Bag Inserters

Pallet Wrapping Machines

Integrated Equipment

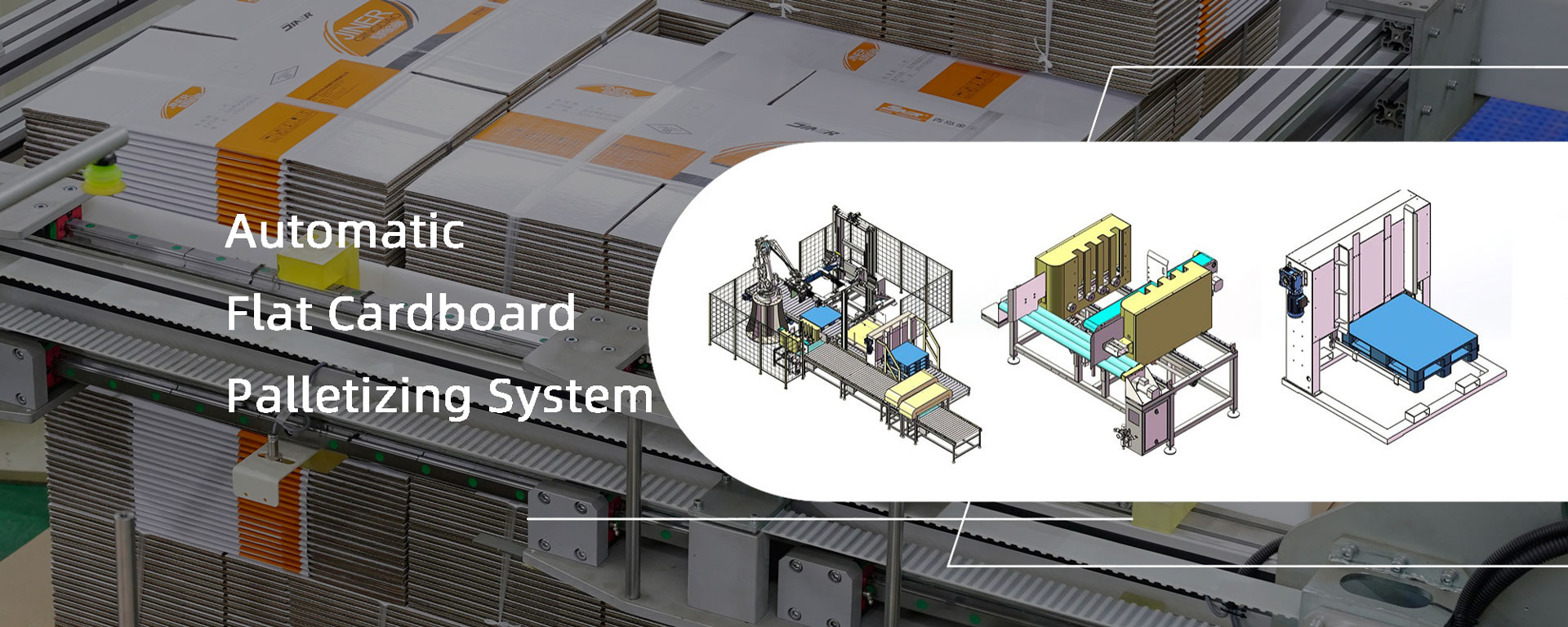
Automatic Flat Cardboard Palletizing System

Automatic Welding Wire Coil Packaging System

Automatic Welding Electrode Rod Packaging System
